
Time to organize the wiring mess in the legs. The power for the servos will run directly from the batteries. Each servo has a signal line running through a twisted pair of wires I stripped from a Cat-5 cable.
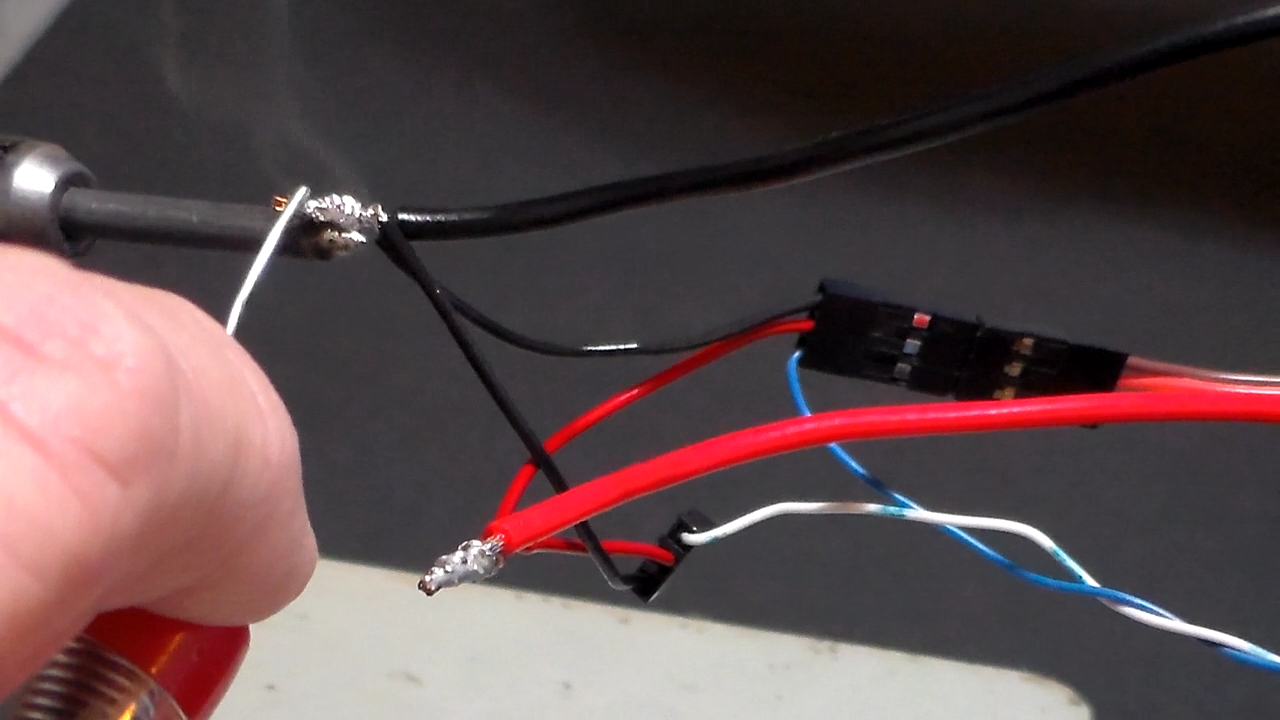
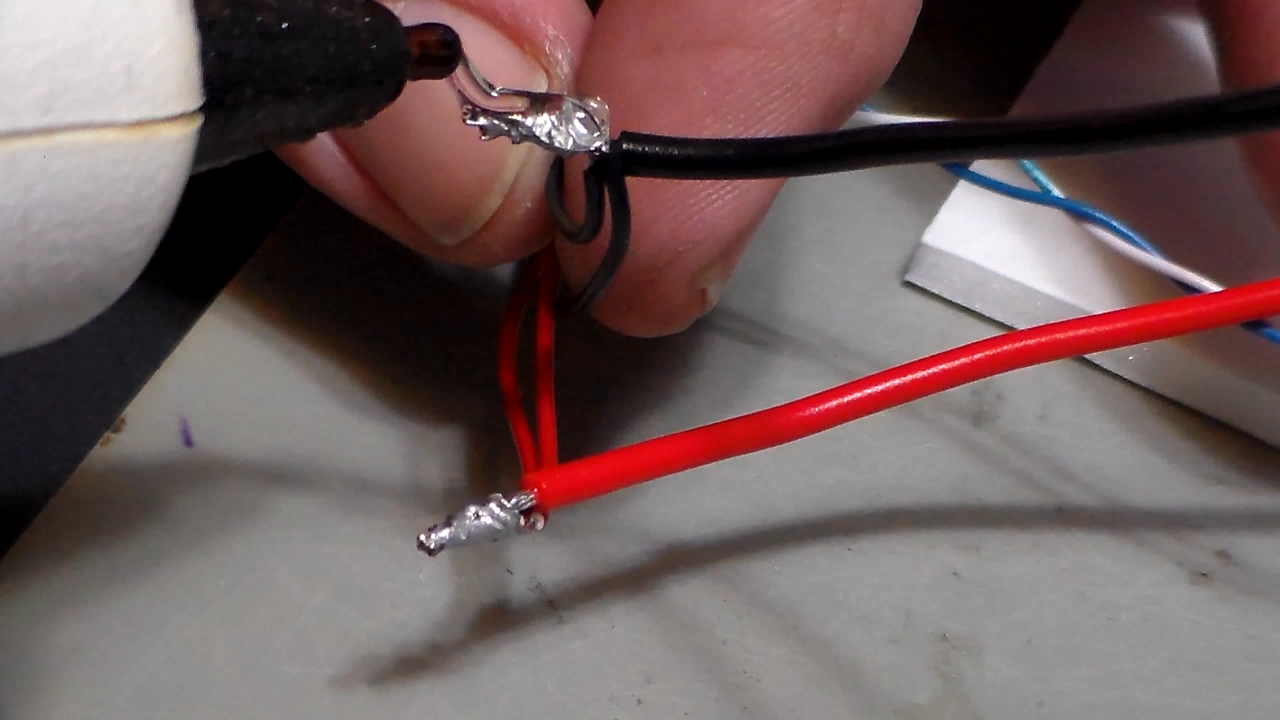
After crimping on the dupont pins and plastic sockets, all the connections to the power bus were soldered. The colored pairs of solids and stripes go to the corresponding servos for each joint.
 Instead of using tape or shrink tubing, hot glue was used. Its non-conductive and can also be used as a strain relief for the connections.
Instead of using tape or shrink tubing, hot glue was used. Its non-conductive and can also be used as a strain relief for the connections.
 Once all the connections were sealed up in hot glue, some soda straw keepers were glued in to keep things from moving.
Once all the connections were sealed up in hot glue, some soda straw keepers were glued in to keep things from moving.
 The signal lines from both legs are going into a single Uno for the time being. Once the programming and mechanics all check out, each leg will have its own Arduino for control. A video of the legs moving via the Uno will be out later this week on ShadoWorxVideo.com.
The signal lines from both legs are going into a single Uno for the time being. Once the programming and mechanics all check out, each leg will have its own Arduino for control. A video of the legs moving via the Uno will be out later this week on ShadoWorxVideo.com.